
[프로젝트] AI Spark 글로벌 산불감지 챌린지, TransUNet, Attention U-Net
Inha univ. | 연구개발특구
[Code] , [ProjectPage]
Review
이번 인공지능 대회는 처음 참가했으며, 짧은 기간 동안 성능을 높이기 위해 많은 노력을 기울였습니다. 단순히 모델 선정과 구현만 중요한 것이 아니라, 데이터셋을 세밀하게 분석하고, 정확도를 높이기 위한 데이터 전처리 과정의 필요성을 깊이 깨달았습니다. 다음 대회에서는 이를 더욱 철저히 준비할 계획입니다.
높은 성능을 달성하기 위해 기존 모델을 앙상블하는 방법이 좋은 결과를 낸다는 점도 배웠습니다. 단일 모델로 90% 근방의 성능을 달성했지만, 그 이상으로 끌어올리는 데는 어려움을 겪었습니다. 다음 대회에서는 이 부분을 개선하고자 합니다.
또한, 코드 수정 과정에서 과거 버전으로 돌아가야 하는 상황에서 로그 관리의 중요성을 절실히 느꼈습니다. 기존 코드를 덮어쓰는 방식으로 작업하다 보니 어려움이 있었고, 이를 해결하기 위해 버전 관리의 필요성을 깨닫게 되었습니다. Git에 대해 이후 공부했습니다.
약 3주 간에 기록 (24/3/8 ~ 24/3/25)
이전 대회 다른 블로그
-
제4회 2023 연구개발특구 AI SPARK 챌린지 - 공기압축기 이상 판단
[공모전] 2023 연구개발특구 AI SPARK 챌린지 - 공기압축기 이상 판단
산업용 공기압축기의 이상 유무를 비지도학습 방식을 이용하여 판정
-
제3회 연구개발특구 AI SPARK 챌린지 최우수상
참고한 논문 [2가지]
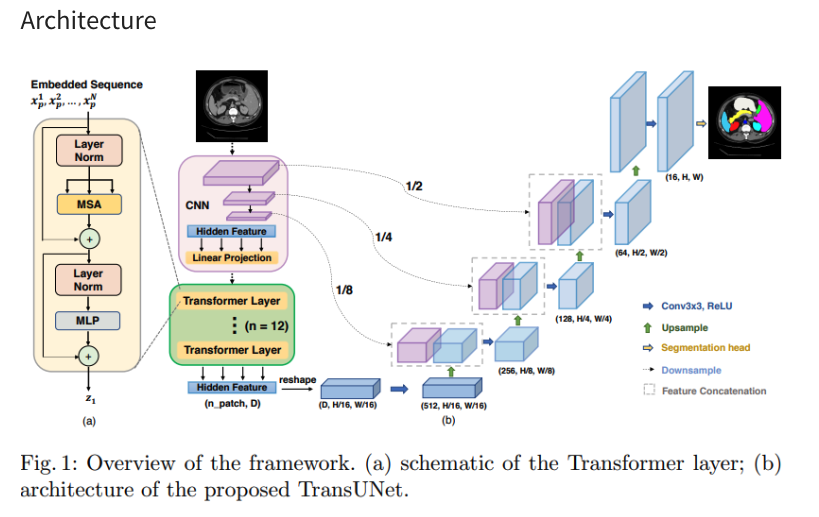
1. 3D TransUNet: Advancing Medical Image Segmentation through Vision Transformers
3D TransUNet: Advancing Medical Image Segmentation through Vision…
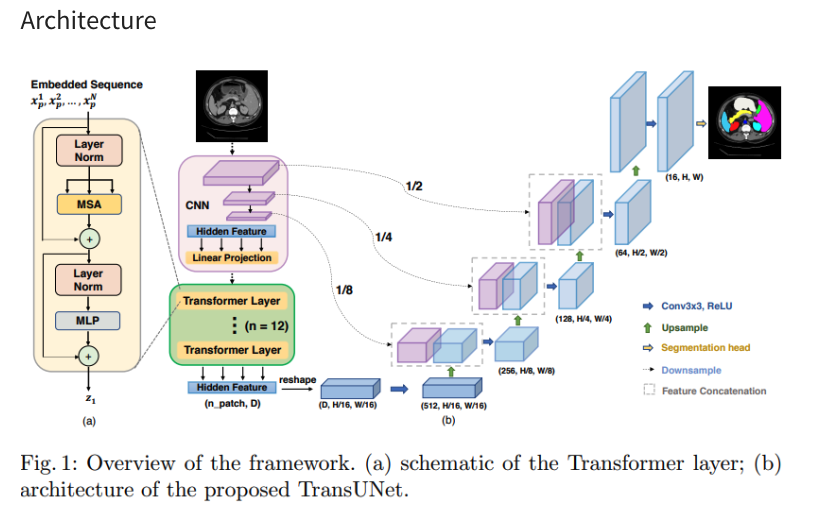
TransUNet - Transformer를 적용한 Segmentation Model 논문 리뷰
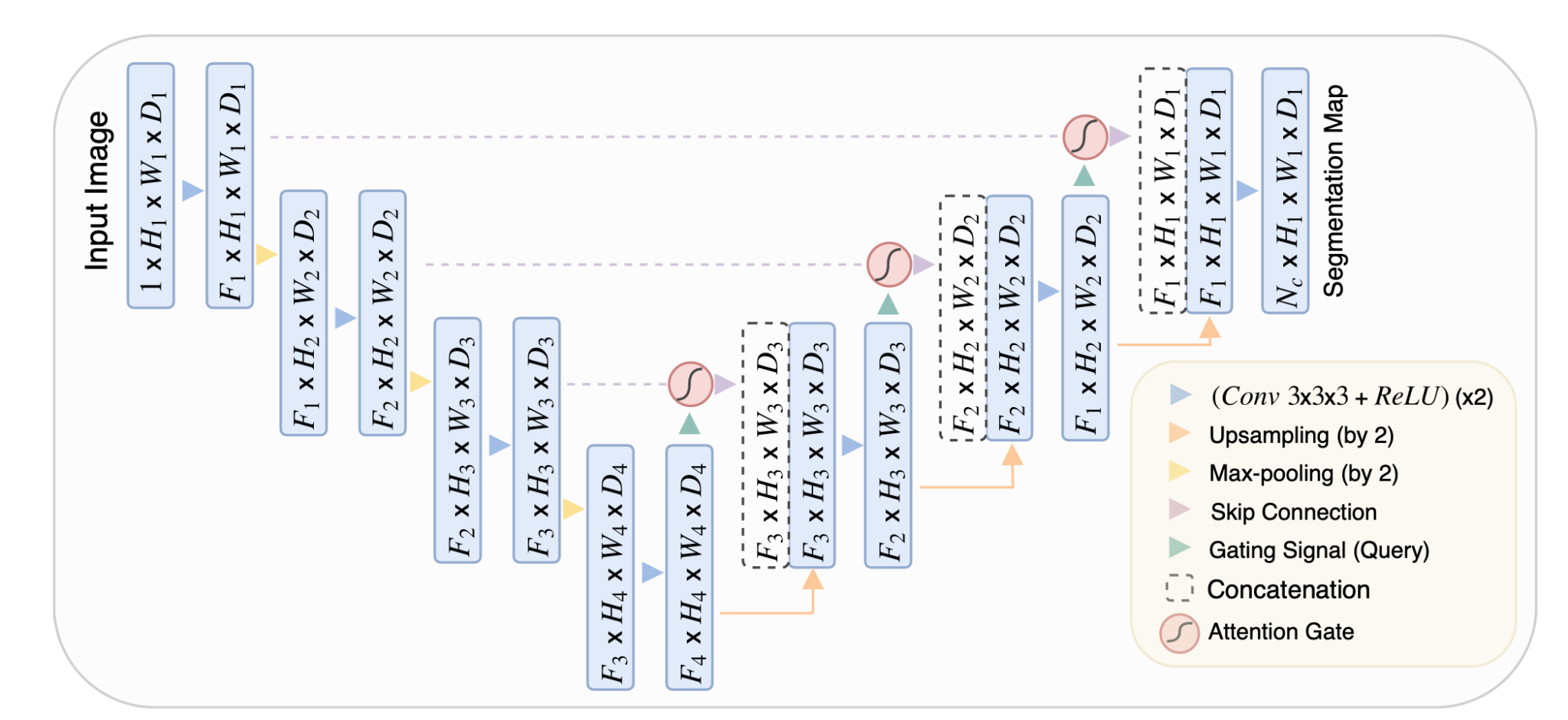
2. Attention U-Net: Learning Where to Look for the Pancreas” by Ozan Oktay et al. (2018)
Attention U-Net: Learning Where to Look for the Pancreas
구현
1. Attention U-Net: Learning Where to Look for the Pancreas” by Ozan Oktay et al. (2018)
핵심 코드
def Attention_U_Net(nClasses, input_height=256, input_width=256, n_filters=16, dropout=0.1, batchnorm=True, n_channels=10):
inputs = Input(shape=(input_height, input_width, n_channels))
# Contracting Path
c1 = conv2d_block(inputs, n_filters * 1, kernel_size=3, batchnorm=batchnorm)
p1 = MaxPooling2D((2, 2))(c1)
p1 = Dropout(dropout)(p1)
c2 = conv2d_block(p1, n_filters * 2, kernel_size=3, batchnorm=batchnorm)
p2 = MaxPooling2D((2, 2))(c2)
p2 = Dropout(dropout)(p2)
c3 = conv2d_block(p2, n_filters * 4, kernel_size=3, batchnorm=batchnorm)
p3 = MaxPooling2D((2, 2))(c3)
p3 = Dropout(dropout)(p3)
c4 = conv2d_block(p3, n_filters * 8, kernel_size=3, batchnorm=batchnorm)
p4 = MaxPooling2D((2, 2))(c4)
p4 = Dropout(dropout)(p4)
# Bottleneck
bn = conv2d_block(p4, n_filters * 16, kernel_size=3, batchnorm=batchnorm)
# Expansive Path
u6 = Conv2DTranspose(n_filters * 8, (3, 3), strides=(2, 2), padding='same')(bn)
c4 = attention_gate(u6, c4, n_filters * 8)
u6 = Concatenate()([u6, c4])
u6 = Dropout(dropout)(u6)
c6 = conv2d_block(u6, n_filters * 8, kernel_size=3, batchnorm=batchnorm)
u7 = Conv2DTranspose(n_filters * 4, (3, 3), strides=(2, 2), padding='same')(c6)
c3 = attention_gate(u7, c3, n_filters * 4)
u7 = Concatenate()([u7, c3])
u7 = Dropout(dropout)(u7)
c7 = conv2d_block(u7, n_filters * 4, kernel_size=3, batchnorm=batchnorm)
u8 = Conv2DTranspose(n_filters * 2, (3, 3), strides=(2, 2), padding='same')(c7)
c2 = attention_gate(u8, c2, n_filters * 2)
u8 = Concatenate()([u8, c2])
u8 = Dropout(dropout)(u8)
c8 = conv2d_block(u8, n_filters * 2, kernel_size=3, batchnorm=batchnorm)
u9 = Conv2DTranspose(n_filters * 1, (3, 3), strides=(2, 2), padding='same')(c8)
c1 = attention_gate(u9, c1, n_filters * 1)
u9 = Concatenate()([u9, c1])
u9 = Dropout(dropout)(u9)
c9 = conv2d_block(u9, n_filters * 1, kernel_size=3, batchnorm=batchnorm)
# Output Layer
output = Conv2D(nClasses, (1, 1), activation='sigmoid')(c9)
attention과 unet 자체가 가벼움 각 depth 마다 attention layer가 추가되어 개별적인 추론에 능숙
최고 성능 : 74%
2. 3D TransUNet: Advancing Medical Image Segmentation through Vision Transformers
핵심 코드
def transunet(nClasses, input_height=256, input_width=256, n_filters = 16, dropout = 0.1, batchnorm = True, n_channels=10):
input_img = Input(shape=(input_height,input_width, n_channels))
# contracting path
c1 = conv2d_block(input_img, n_filters=n_filters*1, kernel_size=3, batchnorm=batchnorm)
p1 = MaxPooling2D((2, 2)) (c1)
p1 = Dropout(dropout)(p1)
c2 = conv2d_block(p1, n_filters=n_filters*2, kernel_size=3, batchnorm=batchnorm)
p2 = MaxPooling2D((2, 2)) (c2)
p2 = Dropout(dropout)(p2)
c3 = conv2d_block(p2, n_filters=n_filters*4, kernel_size=3, batchnorm=batchnorm)
p3 = MaxPooling2D((2, 2)) (c3)
p3 = Dropout(dropout)(p3)
c4 = conv2d_block(p3, n_filters=n_filters*8, kernel_size=3, batchnorm=batchnorm)
p4 = MaxPooling2D(pool_size=(2, 2)) (c4)
p4 = Dropout(dropout)(p4)
# Prepare for Transformer
p3_flat = Reshape((16*16, 128))(p4)
# Initialize the input for the first Transformer block
transformer_input = p3_flat
# Create a series of Transformer blocks
for i in range(4): # 12 Transformer blocks
transformer_block = TransformerEncoder(
filters=n_filters * 8, num_heads=n_filters * 8, ff_dim=n_filters * 8, rate=dropout, name=f"transformer_encoder_{i}"
)
transformer_output = transformer_block(transformer_input)
transformer_input = transformer_output # Output of the current block is the input for the next
# Reshape back to the spatial dimensions for convolution
t_encoded_reshaped = Reshape((input_height // 16, input_width // 16, n_filters * 8))(transformer_output)
# expansive path
u6 = Conv2DTranspose(n_filters*8, (3, 3), strides=(2, 2), padding='same') (t_encoded_reshaped)
u6 = concatenate([u6, c4])
u6 = Dropout(dropout)(u6)
c6 = conv2d_block(u6, n_filters=n_filters*8, kernel_size=3, batchnorm=batchnorm)
u7 = Conv2DTranspose(n_filters*4, (3, 3), strides=(2, 2), padding='same') (c6)
u7 = concatenate([u7, c3])
u7 = Dropout(dropout)(u7)
c7 = conv2d_block(u7, n_filters=n_filters*4, kernel_size=3, batchnorm=batchnorm)
u8 = Conv2DTranspose(n_filters*2, (3, 3), strides=(2, 2), padding='same') (c7)
u8 = concatenate([u8, c2])
u8 = Dropout(dropout)(u8)
c8 = conv2d_block(u8, n_filters=n_filters*2, kernel_size=3, batchnorm=batchnorm)
u9 = Conv2DTranspose(n_filters*1, (3, 3), strides=(2, 2), padding='same') (c8)
u9 = concatenate([u9, c1], axis=3)
u9 = Dropout(dropout)(u9)
c9 = conv2d_block(u9, n_filters=n_filters*1, kernel_size=3, batchnorm=batchnorm)
outputs = Conv2D(1, (1, 1), activation='sigmoid') (c9)
model = Model(inputs=[input_img], outputs=[outputs])
return model
transformer가 무거움, 전반적인 구조와 특징을 잘잡음
최고 성능 : 86%
Loss
Combination Loss: Dice and Cross-Entropy Loss
- 조합: Dice 손실과 크로스 엔트로피(Cross-Entropy) 손실의 조합입니다.
- 목적: Dice 손실은 예측 마스크와 실제 마스크 간의 유사도를 최대화하는 반면, 크로스 엔트로피 손실은 예측된 확률 분포와 실제 레이블 간의 차이를 최소화합니다. 이 두 손실을 조합함으로써, 모델은 마스크의 형태를 잘 캡처하면서도 개별 픽셀 분류에 대한 성능을 향상시킬 수 있습니다.
Combination Loss: Focal and Tversky Loss
- 조합: Focal 손실과 Tversky 손실의 조합입니다.
- 목적: Focal 손실은 잘못 분류된 예측에 더 많은 주의를 기울이고, Tversky 손실은 클래스 불균형과 False Positives 및 False Negatives 사이의 균형을 조절합니다. 이 조합을 사용함으로써, 모델은 클래스 불균형이 심각한 세그멘테이션 문제에서 더 나은 성능을 보일 수 있습니다.
데이터 셋 특징
6번 7번 channel에서 특이점 발견
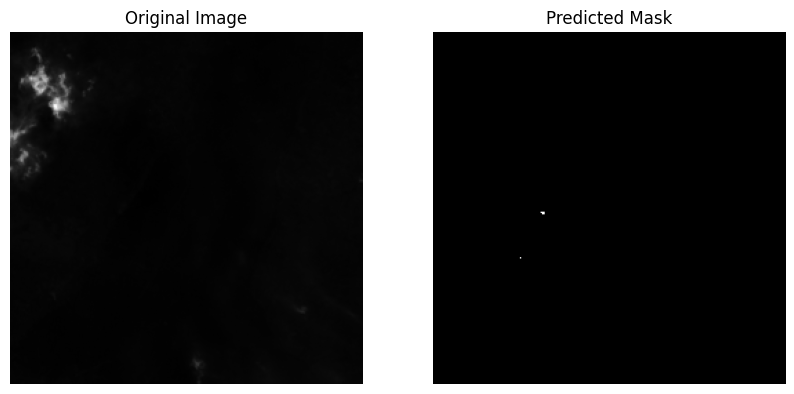
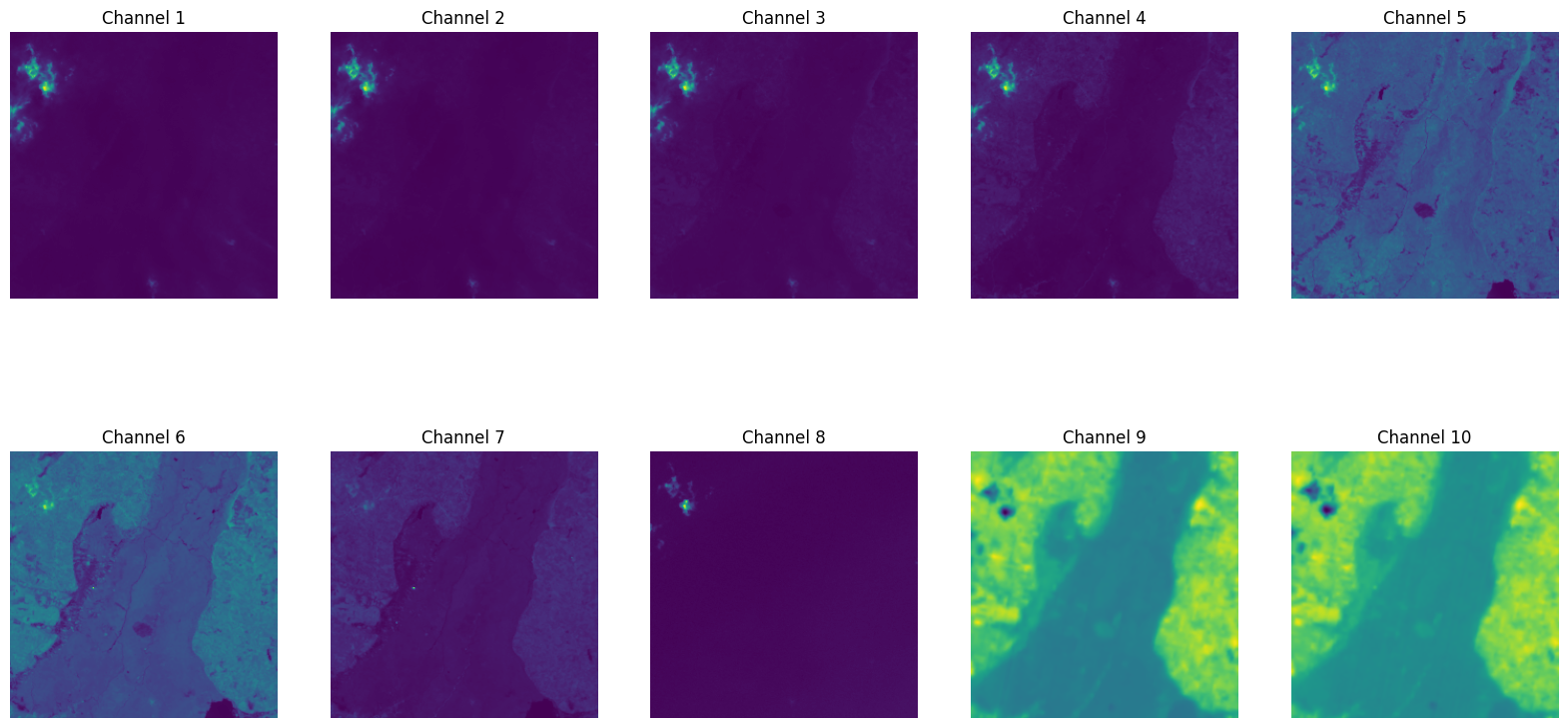
두 그래프를 보면 예측된 값에 이미지랑 겹치는 부분이 6번과 7번에서 밝게 보임
실제 특징을 잡을 수 있는 layer 추가하는 아이디
Segmentation task에서 활용할 수 있는 다양한 Loss
1. Cross-Entropy Loss (Categorical Crossentropy)
- If your segmentation task is multi-class where each pixel is classified into one of several categories, categorical crossentropy is a common starting point. It measures the performance of a classification model whose output is a probability value between 0 and 1.
2. Dice Loss
-
Particularly popular for medical image segmentation and applicable to satellite imagery as well, the Dice loss function is excellent for dealing with class imbalance, which is common in segmentation tasks. It is defined as 1−prediction+truth2∗intersection, effectively measuring how well the predicted segmentation matches the ground truth. Sometimes, it’s combined with cross-entropy loss to leverage the benefits of both.
import tensorflow as tf def dice_loss(y_true, y_pred, smooth=1e-6): """ Dice loss, used for imbalanced data. :param y_true: True labels. :param y_pred: Predictions. :param smooth: Small number to avoid division by zero. :return: Dice loss. """ # Flatten the labels and predictions y_true_f = tf.reshape(y_true, [-1]) y_pred_f = tf.reshape(y_pred, [-1]) # Calculate intersection and union intersection = tf.reduce_sum(y_true_f * y_pred_f) union = tf.reduce_sum(y_true_f) + tf.reduce_sum(y_pred_f) # Calculate the Dice score and then the Dice loss dice = (2. * intersection + smooth) / (union + smooth) dice_loss = 1 - dice return dice_loss
3. Jaccard Loss (IoU - Intersection over Union)
- Similar to Dice loss, Jaccard loss (or IoU loss) is useful for segmentation tasks. It measures the size of the intersection divided by the size of the union of the predicted and ground truth masks. Like Dice, it is robust to class imbalance.
4. Focal Tversky Loss
- An extension of the Tversky loss that incorporates the focal loss principle to focus learning more on hard examples and less on easy ones. This can be particularly useful if your model struggles with certain classes or specific areas within the satellite images.
5. Weighted Cross-Entropy Loss
- For tasks with significant class imbalance, weighted cross-entropy can provide a mechanism to assign more importance to less frequent classes, ensuring the model doesn’t become biased toward the dominant class.
6. Combined Loss Functions
- Often, a combination of the above loss functions (e.g., a weighted sum of Dice loss and cross-entropy loss) is used to leverage the benefits of each. This approach allows you to balance the spatial consistency enforced by Dice or IoU with the pixel-wise classification accuracy of cross-entropy.
몇가지를 조합해서 사용
requirements.txt
numpy pandas rasterio tensorflow==2.14.0 scikit-learn matplotlib keras tqdm joblib opencv-python scipy tifffile jupyter tensorflow-model-optimization